L T P Sessional: 25 Marks
- - 2 Practical: 25 Marks
Total : 50 Marks
Duration of Exam: 3 Hrs.
List of Experiments:
1. To study various types of Kinematic links, pairs, chains and Mechanisms.
2. To study inversions of 4 Bar Mechanisms, Single and double slider crank mechanisms.
3. To plot slider displacement, velocity and acceleration against crank rotation for single slider crank mechanism.
4. To find coefficient of friction between belt and pulley.
5. To study various type of cam and follower arrangements.
6. To plot follower displacement vs cam rotation for various Cam Follower systems.
7. To generate spur gear involute tooth profile using simulated gear shaping process.
8. To study various types of gears – Helical , cross helical worm, bevel gear.
9. To study various types of gear trains – simple, compound, reverted, epicyclic and differential.
10. To find co-efficient of friction between belt and pulley.
11. To study the working of Screw Jack and determine its efficiency.
12. Create various types of linkage mechanism in CAD and simulate for motion outputs and study the relevant effects.
13. Creation of various joints like revolute, planes, spherical, cam follower and study the degree of freedom and motion patterns available.
14. To design a cam profile by using the requirement graph using on-line engineering handbook and verify the same using a 3D mechanism on CAD.
Note :
1. At least Ten experiments are to be performed in the Semester.
2. At least eight experiments should be performed from the above list. However these experiments should include experiments at Sr. No. 12, 13 and 14. Remaining two experiments may either be performed from the above list or as designed & set by the concerned institution as per the scope of the syllabus.
EXPERIMENT No. 1
AIM: - To study various types of kinematics links, pairs, chains & Mechanisms.
APPARATUS USED: - Kinematics links, pairs, chains & Mechanisms. ( Kinematic Pair Board)
THEORY: -
What is Kinematics?
Kinematics is the study of motion (position, velocity, acceleration).
What is Kinetics?
Kinetics is the study of effect of forces on moving bodies.
Kinematic Link:
A link is defined as a member or a combination of members of a mechanism connecting other members and having relative motion between them. The link may consist of one or more resistant bodies. A link may be called as kinematic link or element. Eg: Reciprocating steam engine.
Classification of kinematic link is binary, ternary and quaternary
{kind=link}
Joint: A connection between two links that allows motion between the links. The motion allowed may be rotational (revolute joint), translational (sliding or prismatic joint), or a combination of the two (roll-slide joint).
Kinematic pair: Kinematic pair is a joint of two links having relative motion between them. The types of kinematic pair are classified according to
· Nature of contact ( lower pair, Higher pair)
· Nature of mechanical contact ( Closed pair, unclosed pair)
· Nature of relative motion ( Sliding pair, turning pair, rolling pair, screw pair, spherical pair)
Kinematic chain:
When the kinematic pairs are coupled in such a way that the last link is joined to the first link to transmit definite motion it is called a kinematic chain.
Eg: The crank shaft of an engine forms a kinematic pair with the bearings which are fixed in a pair, the connecting rod with the crank forms a second kinematic pair, the piston with the connecting rod forms a third
pair and the piston with the cylinder forms the fourth pair. The total combination of these links is a kinematic chain. Eg: Lawn mover
Here, we had to check whether the given link is a kinematic chain We can use two formulas
1. l = 2p-4
2. j= (3/2)l – 2
Mechanism:
If motion of any of the movable links results in definite motions of the others the linkage is known as mechanism
Machine:
When a mechanism is required to transmit power or to do some particular type of work it then becomes a machine.
Degrees of Freedom:
It is defined as the number of input parameters which must be independently controlled in order to bring the mechanism in to useful engineering purposes.
It is also defined as the number of independent relative motions, both translational and rotational, a pair can have.
Degrees of freedom = 6 – no. of restraints.
To find the number of degrees of freedom for a plane mechanism we have
Grubler’s equation F = 3 (n – 1) – 2 j1 – j2
F = Mobility or number of degrees of freedom
n = Number of links including frame
j1 = Joints with single (one) degree of freedom
J2 = Joints with two degrees of freedom
F > 0, results in a mechanism with ‘F’ degrees of freedom
F = 0, results in a statically determinate structure
F < 0, results in a statically indeterminate structure.
CONCLUSION: Hence the study of various types of kinematics links, pairs, chains & Mechanisms is completed.
EXPERIMENT No. 2
AIM: - To study inversions of 4 Bar Mechanisms, Single & double slider crank mechanisms.
APPARATUS USED: - Single slider crank mechanism & double slider crank mechanism.
THEORY: -
FOUR BAR MECHANISM: - A four bar link mechanism or linkage is the most fundamental of the plane kinematics linkages. Basically it consists of four rigid links which are connected in the form of a quadrilateral by four pin joints.
INVERSIONS OF SINGLE SLIDER–CRANK CHAIN :-
Different mechanisms obtained by fixing different links of a kinematics chain are known as its inversions. A slider –crank chain has the following inversions :-
Ø First inversion (i.e; Reciprocating engine and compressor)
Ø Second inversion (i.e., Whitworth quick return mechanism and Rotary engine)
Ø Third inversion (i.e., Oscillating cylinder engine and crank & slotted – lever mechanism)
Ø Fourth inversion (Hand pump)
INVERSIONS OF DOUBLE-SLIDER CRANK-CHAIN:
A four-bar chain having two turning and two sliding pairs such that two pairs of the same kind are adjacent is known as a double-slider-crank chain. The following are its inversions:
Ø First inversion (i.e., Elliptical trammel)
Ø Second inversion (i.e., Scotch yoke)
Ø Third inversion (i.e., Actual Oldham’s coupling)
PROCEDURE:
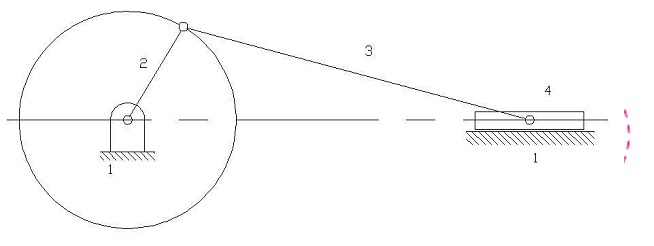
Reciprocating engine mechanism: In the first inversion, the link 1 i.e., the cylinder and the frame is kept fixed. The fig below shows a reciprocating engine.
{kind=link}
{kind=link}
slotted link 1 is fixed. When the crank 2 rotates about O, the sliding piston 4 reciprocates in the slotted link 1. This mechanism is used in steam engine, pumps, compressors, I.C. engines, etc.
Crank and slotted lever mechanism: It is an application of second inversion. The crank and slotted lever mechanism is shown in figure below.
{kind=link}
This mechanism is used in shaping machines, slotting machines and in rotary engines.
In this mechanism link 3 is fixed. The slider (link 1) reciprocates in oscillating slotted lever (link 4) and crank (link 2) rotates. Link 5 connects link 4 to the ram (link 6). The ram with the cutting tool reciprocates perpendicular to the fixed link 3. The ram with the tool reverses its direction of motion when link 2 is
perpendicular to link 4. Thus the cutting stroke is executed during the rotation of the crank through angle α and the return stroke is executed when the crank rotates through angle β or 360 – α. Therefore, when the crank rotates uniformly, we get,
{kind=link}
Whitworth quick return motion mechanism:
{kind=link}
Third inversion is obtained by fixing the crank i.e. link 2. Whitworth quick return mechanism is an application of third inversion. This mechanism is shown in the figure below. The crank OC is fixed and OQ rotates about O. The slider slides in the slotted link and generates a circle of radius CP. Link 5 connects the extension OQ provided on the opposite side of the link 1 to the ram (link 6). The rotary motion of P is taken to the ram R which reciprocates. The quick return motion mechanism is used in shapers and slotting machines. The angle covered during cutting stroke from P1 to P2 in counter clockwise direction is α or 360 -2θ. During the return stroke, the angle covered is 2θ or β.
{kind=link}
Rotary engine mechanism or Gnome Engine:
Rotary engine mechanism or gnome engine is another application of third inversion. It is a rotary cylinder V – type internal combustion engine used as an aero – engine. But now Gnome engine has been replaced by Gas turbines. The Gnome engine has generally seven cylinders in one plane. The crank OA is fixed and all the
connecting rods from the pistons are connected to A. In this mechanism when the pistons reciprocate in the cylinders, the whole assembly of cylinders, pistons and connecting rods rotate about the axis O, where the entire mechanical power developed, is obtained in the form of rotation of the crank shaft. This mechanism is shown in the figure below.
{kind=link}
Double Slider Crank Chain: A four bar chain having two turning and two sliding pairs such that two pairs of the same kind are adjacent is known as double slider crank chain.
Inversions of Double slider Crank chain: It consists of two sliding pairs and two turning pairs. There are three important inversions of double slider crank chain. 1) Elliptical trammel. 2) Scotch yoke mechanism. 3) Oldham ’s Coupling.
Elliptical Trammel: This is an instrument for drawing ellipses. Here the slotted link is fixed. The sliding block P and Q in vertical and horizontal slots respectively. The end R generates an ellipse with the displacement of sliders P and Q.
{kind=link}
{kind=link}
Scotch yoke mechanism: This mechanism is used to convert rotary motion in to reciprocating motion.The inversion is obtained by fixing either the link 1 or link 3. Link I is fixed. In this mechanism when the link 2 rotates about B as centre, the link 4 reciprocates. The fixed link 1 guides the frame.
{kind=link}
{kind=link}
{kind=link}
An application of the third inversion of the double slider crank mechanism is Oldham ’s coupling shown in the figure. This coupling is used for connecting two parallel shafts when the distance between the shafts is small. The two shafts to be connected have flanges at their ends, secured by forging. Slots are cut in the flanges. These flanges form 1 and 3. An intermediate disc having tongues at right angles and opposite sides is fitted in between the flanges. The intermediate piece forms the link 4 which slides or reciprocates in flanges 1 & 3. The link two is fixed as shown. When flange 1 turns, the intermediate disc 4 must turn through the same angle and whatever angle 4 turns, the flange 3 must turn through the same angle. Hence 1, 4 & 3 must have the same angular velocity at every instant. If the distance between the axis of the shaft is x, it will be the diameter if the circle traced by the centre of the intermediate piece. The maximum sliding speed of each tongue along its slot is given by v=xω where, ω = angular velocity of each shaft in rad/sec v = linear velocity in m/sec
CONCLUSION: - Hence the study of inversions of 4 Bar Mechanisms, Single & double slider crank mechanisms is completed.
EXPERIMENT No. 3
AIM :- To find coefficient of friction between belt and pulley.
APPARATUS USED:- Belt & Pulley System.
THEORY:-
Belt: - Power is transmitted from one to another by means of belts.
Ø Belts are used where the distance between the shafts is large.
Ø Belts are flexible type of connectors.
Ø The flexibility of belts and ropes is due to the property of their materials.
Ø Belts transmit power due to friction between them and the pulleys.
Ø If the power transmitted exceeds the force of friction, the belt slips over the pulley.
Ø Belts are strained during motion as tensions are developed in them.
Ø Owing to slipping and straining action, belts are not positive type of drives.
Types of belts :-
1. Flat belt
2. V-belt
Material for belts :- Usual materials are leather, canvas, cotton and rubber.
PULLEY :- Pulley are mounted on the two shafts. The speed of the driven shaft can be varied by varying the diameters of the pulleys.
Types of pulleys :-
Ø Idler pulleys
Ø Intermediate pulleys
Ø Loose and fast pulleys
Ø Guide pulleys
FORMULAE USED:-
T1/ T2 = ℮ µ θ
Where
|
T1 = Tension at the tight side of the belt
|
( N/m2 )
|
T2 = Tension at the slack side of the belt
|
( N/m2 )
|
µ = Co-efficient of Friction between belt and pulley
θ = Arc of contact( rad )
OBSERVATION TABLE :-
Sl. No.
|
T1
( N/m2 )
|
T2
( N/m2 )
|
θ
|
µ = (1/θ )log (T1/ T2)
| |
(in degree)
|
( in rad. )
| ||||
CALCULATION: - µ = (1/θ) log (T1/ T2)
PROCEDURE:-
1. Note the angle of contact.
2. Hang some weight on one side of the belt and put some weight on other side of the belt, till the belt just slide.
3. Note down the values of T1 and T2.
4. Vary T1 and correspondingly determine the values of T2.
5. Now calculate the value of µ.
CONCLUSION:- µ (Co-efficient of Friction between belt and pulley ) =
Experiment No:4
AIM: - To study various types of cam and follower arrangements.
APPARATUS USED: - Cam and follower arrangements.
THEORY: -
CAM & FOLLOWER :- A cam is a mechanical member used to impart desired motion to a follower by direct contact. The cam may be rotating or reciprocating whereas the follower may be rotating, reciprocating or oscillating. A cam and the follower combination belong to the category of higher pairs.
• A driver member known as the cam.
• A driven member called the follower
TYPES OF CAMS:
According to shape
II. Radial or Disc Cams :- A cam in which the follower moves radially from the centre of rotation of the cam is known as a radial or a disc cam.
III. Spiral cams :- A spiral cam is a face cam in which a groove is cut in the form of a spiral as shown in fig. the spiral spiral groove consists of teeth which mesh with a pin gear follower.
IV. Cylindrical cams :- In a cylindrical cam, a cylinder which has a circumferential contour cut in the surface, rotate about its axis.
V. Conjugate cams :- A conjugate cam is a double – disc cam, the two discs being keyed together and are in constant touch with the two rollers of a follower. It is used for low noise, high speed and dynamic loads.
VI. Globoidal cams :- A globoidal cam can have two types of surfaces, convex or concave. A circumferential contour is cut on the surface of rotation of the cam to impart motion to the follower which has an oscillatory motion VII. Spherical cams :- In a spherical cam, the follower oscillates about an axis perpendicular to the axis of rotation of the cam.
According to Follower Movement
I. Rise-Return-Rise (R-R-R) :- In this, there is alternate rise and return of the follower with no periods of dwells. Its use is very limited in the industry. The follower has a linear or an angular displacement.
II. Dwell-Rise-Return-Dwell (D-R-R-D) :- In such a type of cam, there is rise and return of the follower after a dwell. This type is used more frequently than the R-R-R type of cam
III. Dwell-Rise-Dwell-Return (D-R-D-R) :- It is most widely used type of cam. The dwelling of the cam is followed by rise and dwell and subsequently by return and dwell.
According to Manner of Constraint of the Follower
I. Pre-loaded Spring Cam
II. Positive-Drive Cam
III. Gravity Cam
Types of Followers :-
1. According to shape
· Knife-edge Follower
· Roller Follower
· Mushroom Follower
2. According to Movement
· Reciprocating Follower
· Oscillating Follower
3. According to Locating of Line of Movement
· Follower
· Offset Foolower
PROCEDURE:
Draw the diagrams of cam and follower arrangements available in the lab.
CONCLUSION:
Hence the study of cam and follower arrangement is completed.
Experiment No:5
AIM: - To study various types of gear- Helical, cross helical, worm, bevel gear.
APPARATUS USED: - Arrangement of gear system.
THEORY:-
CLASSIFICATION OF GEAR :- Gears can be classified according to the relative position of their shaft axis are follows:
A: PARALLEL SHAFT
(i) Spur gear
(ii) Spur rack and pinion
(iii) Helical gears or Helical spur gear
(iv) Double- helical and Herringbone gear
B: INTER SECTING SHAFT
i) Straight bevel gear
ii) Spiral bevel gear
iii) Zerol bevel gear
C: SKEW SHAFT
(i) Crossed- helical gear
(ii) Worm gears( Non-throated, Single throated, Double throated)
SPUR GEAR:- They have straight teeth parallel to the axes and thus are not subjected to axial thrust due to teeth load. Spur gears are the most common type of gears. They have straight teeth, and are mounted on parallel shafts. Sometimes, many spur gears are used at once to create very large gear reductions. Each time a gear tooth engages a tooth on the other gear, the teeth collide, and this impact makes a noise. It also increases the stress on the gear teeth. Spur gears are the most commonly used gear type. They are characterized by teeth, which are perpendicular to the face of the gear. Spur gears are most commonly available, and are generally the least expensive.
{kind=link}
HELICAL GEARS:- In helical gears, the teeth are curved, each being helical in shape. Two mating gears have the same helix angle, but have teeth of opposite hands. At the beginning of engagement, contact occurs only at the point of leading edge of the curved teeth. As the gears rotate, the contact extends along a diagonal line across the teeth. Thus the load application is gradual which result in now impact stresses and reduction in noise. Therefore, the helical gears can be used at higher velocities then the spur gears and have greater load – carrying capacity. The teeth on helical gears are cut at an angle to the face of the gear. When two teeth on a helical gear system engage, the contact starts at one end of the tooth and gradually spreads as the gears rotate, until the two teeth are in full engagement. This gradual engagement makes helical gears operate much more smoothly and quietly than spur gears. For this reason, helical gears are used in almost all car transmission. Because of the angle of the teeth on helical gears, they create a thrust load on the gear when they mesh. Devices that use helical gears have bearings that can support this thrust load.
{kind=link}
DOUBLE HELICAL AND HERRING BONE GEARS :- A- double- helical gear is equivalent to a pair of helical gears secured together, one having a right – hand helix and the other a left hand helix. The tooth of two raw is separated by a grooved used for too run out.
If the left and the right inclinations of a double – helical gear meet at a common apex and there is no groove in between, the gear is known as herring bone gear.
CROSSED – HELICAL GEAR :- The used of crossed helical gear or spiral gears is limited to light loads. By a suitable choice of helix angle for the mating gears, the two shaft can be set at any angle.
WORM GEAR :- Worm gear is a special case of spiral gear in which the larger wheel, usually, has a hollow or concave shape such that a portion of the pitch diameter is the other gear is enveloped on it. The smaller of two wheels is called the worm which also has larger spiral angle. worm gear: Worm gears are used when large gear reductions are needed. It is common for worm gears to have reductions of 20:1, and even up to 300:1 or greater.
{kind=link}
BEVEL GEAR :- Kinematically, the motion between two intersecting shafts is equivalent to the rolling of two cones, assuming no slipping. The gears, in general, are known as bevel gear. When teeth formed on the cones are straight, the gear are known as straight bevel and when inclined, they are known as spiral or helical bevel.
CONCLUSION :- Hence the study of gears is completed.
Experiment No 6:
AIM: - To study various types of gear trains- simple, compound, reverted, epicyclic and differential.
APPARATUS USED: -. Models of Gear train system.
THEORY: -
GEAR TRAIN :- A gear train is a combination of gears used to transmit motion from one shaft to
another. It becomes necessary when it is required to obtain large speed reduction within a small space. The following are the main types of gear trains:
(i) Simple gear train
(ii) Compound gear train
(iii) Reverted gear train
(iv) Planetary gear train
SIMPLE GEAR TRAIN :- A series of gears, capable of receiving and transmitting motion from one gear to another is called a simple gear train. In it, all the gear axes remain fixed relative to the frame and each gear is on a separate shaft.
Train Value = Number of teeth on driving gear / Number of teeth on driven gear
COMPOUND GEAR TRAIN :- When a series of gears are connected in such a way that two or more gears rotate about an axis with the same angular velocity, it is known as compound gear train. In this type, some of the intermediate shafts.
Train Value = Product of Number of teeth on driving gear / Product of Number of teeth on driven gear
REVERTED GEAR TRAIN :- If the axes of the first and last wheels of a compound gear coincide; it is called a reverted gear train. Such an arrangement is used in clocks and in simple lathes where ‘back gear’ is used to give a slow speed to the chuck.
Train Value = Product of Number of teeth on driving gear / Product of Number of teeth on driven gear
PLANETARY OR EPICYCLIC GEAR TRAIN :- When there exists a relative motion of axis in gear train, it is called a planetary or an epicyclic gear train (or simply epicyclic gear or train). Thus in an epicyclic train, the axis of at least one of the gears also moves relative to the frame.
Consider two gear wheels S and P, the axis of which are connected by an arm a. if the arm ‘a’ is fixed, the wheels S and P constitute a simple train. However, if the wheel s is fixed so that the arm can rotate about the axis of S, the wheel P would also move around S. therefore, it is an epicyclic train.
DIFFERENTIAL GEAR :- When a vehicle takes a turn, the outer wheels must travel farther than the inner wheels. In automobiles, the front wheels can rotate freely on their axis and thus can adapt themselves to the conditions. Both rear wheels are driven by the engine through gearing. Therefore, some sirt of automatic device is necessary so that the two rear wheels are driven at slightly different speeds. This is accomplished by fitting a differential gear on the rear axle.
CONCLUSION: - Hence the study of gear trains is completed.
EXPERIMENT No. 7
AIM:- To study the working of screw jack and determine its efficiency.
APPARATUS USED: - Screw jack
THEORY :-
Screw Jack :- It is a device employed for lifting heavy loads with help of a small effort applied at its handle. The loads are usually centrally loaded upon it. Screw jacks of three types:
1. Simple screw jack
2. Compound Screw jack
3. Differential Screw jack
A simple screw jack consists of a nut, a screw square threaded and a handle fitted to the head of the screw.
The nut also forms the body of the jack. The load to be lifted is placed on the head of the screw. Here the axial distance between corresponding points on two consecutive threads is known as pitch. If ‘p’ be the pitch of the screw and ‘t’ is the thickness of thread, then p = 2t.
V.R. = Distance moved by the effort/Distance moved by the load
= 2πl / p
Now M.A. = W / P
PROCEDURE:-
When we are moving the handle horizontal direction the screw is also moved it attached with screw and load is lifted by pitch of the screw, in one revolution of the handle.
OBSERVATION:-
For simple Screw Jack:
S.No.
|
Load (W)
in Nt.
|
Effort (P)
(P) in Nt.
|
Length of Lever
lever
|
Pitch of screw
screw
|
V.R.
|
M.A.
|
Efficiency
|
CALCULATION :-
M.A. = W/P
V.R. = Distance moved by effort/Distance moved by load
Efficiency = M.A. / V.R.
Conclusion: Hence the efficiency of screw jack is ____
Download Bank of Maharashtra Admit Card 2017
ReplyDeleteBEL Sub-Engineer Admit Card 2017 Download